基本信息
- 作品名称:
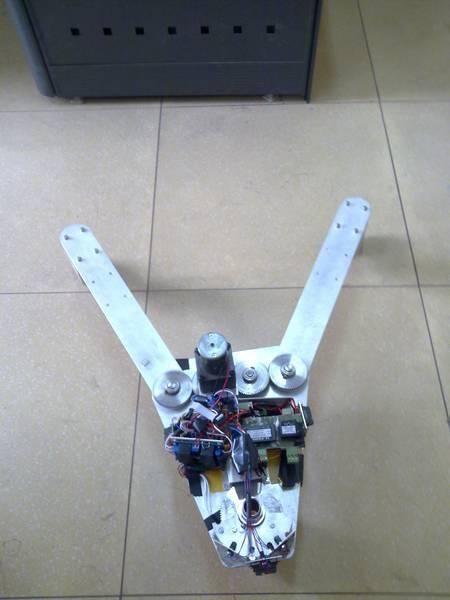
- 智能蛙板机器人
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。
- 详细介绍:
机器人技术是一门快速发展的高新技术,在交通、医疗、军事、工业生产等方面用途广泛。机器人的运动形式、感知方式等是这一领域的一个重要研究方向。 目前已经提出的机器人运动形式有轮式、履带式、步行式等,本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义。该机器人的运动与蛙泳形式相似,通过摆动机器人腿臂,利用腿臂上的反偏向轮与地面的作用力实现平稳运动,在水中也可产生驱动力,同时由于没有螺旋桨,因此不会对水体生物或者人体血管产生风险。机器人驱动机构为直流电机、齿轮,使用金属加工制作;电源使用锂离子电池供电;在此基础上又运用AVR单片机和PWM直流电机控制技术制作了机器人的控制模块,软件使用专家控制系统,实现了蛙板机器人的自动行驶。该机器人能够通过安装在前方和侧方的测距传感器探测运动通道的宽度以及周围的障碍物,通过专家控制系统自动调节运动方向与腿臂开合的宽度,使其能够适应不同的道路宽度,同时适当转向避开障碍物。该机器人使用无线通信模块实现了遥控、多机协同组队前进的功能,使用腿臂上的舵机将动力轮反向后可以实现倒车功能;在两臂实现独立驱动后能够实现更为复杂和敏捷的动作,使得前进、转向、倒车的方式和效率大为增强,甚至可以让该机器人跳出“华尔兹”式的舒展舞蹈。 应用上,可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型、多机协同配合的实验平台。
- 获奖情况:
第十二届“挑战杯”一等奖